

No clássico anime dos anos 90, ela era usada para capturar e lançar aquelas criaturinhas estranhas chamadas Pokémons. Hoje, o mesmo conceito da pokébola está sendo criado para facilitar o estudo da vida marinha.
Para muita gente, falar de pokémons hoje em dia é sinônimo de uma lembrança nostálgica. Baseado no jogo homônimo, Pokémon deu origem ao anime que marcou a infância de milhões de crianças ao longo dos últimos 20 anos. Muitas delas cresceram e tornaram-se cientistas — mas continuaram com seus monstrinhos de bolso no coração. Biólogos já descreveram uma proteína (Pikachurina) e um pterodáctilo (Aerodactylo) com nomes inspirados na série. Mas não são só os bichinhos que estão inspirando a ciência. A pokébola também está chegando aos laboratórios.
Para quem não sabe (ou por algum motivo não se recorda), uma pokébola é uma esfera vermelha e branca, dentro da qual são armazenados os pokémons de cada personagem. Pokémons não existem no mundo real (a não ser que você considere as versões virtuais de Pokémon Go), mas uma pokébola poderia ser muito útil. Onde? Na biologia marinha, por exemplo.
Mais desconhecido que muitos planetas do nosso sistema solar, o ambiente submarino abriga milhares de criaturas tão estranhas quanto delicadas. Estudar esses habitantes das profundezas é arriscado, pois faltam ferramentas adequadas para a captura. As garras existentes e usadas em submarinos robóticos são grosseiras demais e em vez de pegar muitas vezes acabam ferindo ou até esmagando animais como águas-vivas, moluscos e pequenos peixes. Vasos ou ventosas baseados em sucção não são muito melhores. Uma pokébola submarina seria ótima, mas como fazer uma?
Não era nisso que Zhi Ern Teoh pensava em 2014, quando teve aulas com Chuck Hoberman, professor de Engenharia e Design da Universidade Harvard. Teoh estava preocupado com um problema mais imediato, conforme conta ao TechXplore: “Eu estava construindo micro-robôs manualmente na graduação, o que era um trabalho muito exigente e tedioso. Me perguntei se haveria uma forma de dobrar uma superfície plana numa forma tridimensional usando um motor.” Teoh, que já completou o doutorado, agora é um engenheiro na Cooper Perkins.
Transformar algo plano numa superfície tridimensional não é tão difícil quanto parece. Os praticantes de origami vêm realizando isso há milênios. Robôs baseados em origami estavam começando a surgir quando Teoh começou a trabalhar no seu projeto. Seria apenas mais um projeto de mestrado se não fosse o olhar de Brennan Phillips. Colega de laboratório de Teoh, Phillips — atual professor-assistente de Engenharia Oceânica da Universidade de Rhode Island — lhe sugeriu a construção de algo capaz de capturar animais marinhos.
Pokédodecaedro
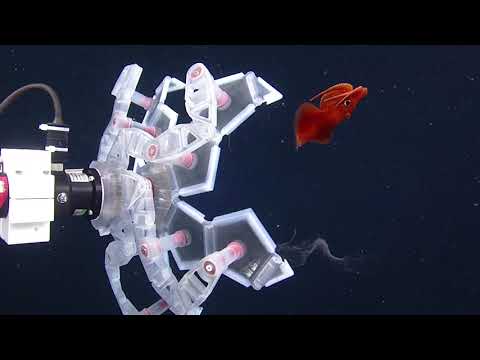
Assim, Teoh construiu um mecanismo dobrável composto de cinco “pétalas” idênticas, montadas sobre uma série de juntas giratórias. Essas pétalas foram feitas numa impressora 3D. Na base dessa “flor”, foi fixado um motorzinho elétrico. Ao ser ligado, o motor gira e aplica um torque capaz de fazer as juntas girar. Presas às juntas, as pétalas de plástico se fecham e formam um dodecaedro oco. Revertendo a rotação do motor, as pétalas podem ser reabertas. Essa estrutura foi batizada de RAD (Rotary Actuated Dodecahedron, algo como Dodecaedro Formado por Rotação). Embora não seja esférico nem caiba no bolso, o mecanismo pode ser considerado uma pokébola.
Para descobrir se o pokédodecaedro inspirado em origami realmente funciona, Teoh e seus colegas testaram o equipamento num aquário em Connecticut. Os testes preliminares consistiam na captura e liberação de exemplares da medusa-da-lua (Aurelia aurita), que chega a ter até 40 cm de diâmetro. Trabalhar num aquário (ainda que num aquário bem grande) é uma coisa; trabalhar em mar aberto é outra.
Antes de testar a pokébola submarina no mar, os cientistas tiveram que reforçá-la para suportar as grandes pressões encontradas a centenas de metros de profundidade. Também foi necessário desenvolver sistemas de controle automáticos e manuais e encontrar uma maneira de fixar o equipamento num mini-submarino cedido pelo Monterey Bay Aquarium Research Institute, da Califórnia. Depois de tudo bem montado e ajustado, o RAD foi levado para uma área ao largo da costa californiana e submerso a profundidades entre 500 e 700 m. Trabalhando com operação manual, a equipe foi capaz de capturar alguns organismos delicados, como lulas e medusas. Em seguida, os animais foram liberados sem qualquer dano.
[youtube_sc url=”https://www.youtube.com/watch?v=AKTPBWXhIhU” autohide=”1″ nocookie=”1″]
“Abdução subaquática”
O processo de desenvolvimento e os resultados dos primeiros testes da pokébola subaquática foram publicados por Teoh et. al. numa edição recente da Science Robotics. Para Teoh, o design do RAD é “perfeito” para ambientes marinhos profundos porque os controles são simples e são poucas as peças que podem quebrar. Como a construção do equipamento é modular, se algo quebrar basta substituir apenas uma peça e voltar ao trabalho imediatamente. Além da exploração submarina, outra possível aplicação seria no espaço, onde a pokébola poderia ajudar a capturar lixo espacial ou abrigar painéis solares.
Para David Gruber, co-autor e professor de Biologia e Ciências Ambientais na City University de Nova York, ainda falta tornar o equipamento mais adequado à exploração submarina: “Gostaríamos de adicionar câmeras e sensores para que, no futuro, possamos capturar um animal, coletar um monte de dados como seu tamanho, propriedades físicas e até seu genoma e depois soltá-lo. Seria meio que uma abdução subaquática.” Assim, antes de descobrir novas espécies que podem ganhar nomes de pokémons (ou limpar o espaço), o RAD vai precisar evoluir — como os bichinhos do anime.
Referência
 Z.E. Teoh et al. Rotary-actuated folding polyhedrons for midwater investigation of delicate marine organisms [Poliedros dobráveis por rotação para investigações aquáticas de organismos marinhos delicados]. Science Robotics, vol. 3, n. 20, 18 de julho de 2018. DOI: 10.1126/scirobotics.aat5276
Z.E. Teoh et al. Rotary-actuated folding polyhedrons for midwater investigation of delicate marine organisms [Poliedros dobráveis por rotação para investigações aquáticas de organismos marinhos delicados]. Science Robotics, vol. 3, n. 20, 18 de julho de 2018. DOI: 10.1126/scirobotics.aat5276
{kind=link}