


Mapeamento 3D de interiores
O vídeo demonstra o funcionamento de um mini-helicóptero para mapear e navegar por interiores de construções e áreas desconhecidas.
O projeto é mantido pelo MIT (Massachusetts Institute of Technology) e emprega um sistema de mapeamento de superfícies com laser, criando assim um mapa de obstáculos que permitem o aparato se movimentar com agilidade mesmo em ambientes desconhecidos.
O uso dos laser é essencial para mapeamento e é estratégico em ambientes que não possuem sinal de GPS.
A unidade aérea pode transportar até 250 gramas de carga e pode ser comunicar via Wifi com uma unidade no solo, sistemas de estabilização ativos permitem uma boa manutenção do equilíbrio da unidade.
A equipe foi a primeira a completar a missão número 5, proposta na International Aerial Robotics Competition, que consistia em navegar por um labirinto e encontrar um objetivo.
Via Make
O Cybraphon precisa de atenção

O Cybraphon é uma espécie de banda automática interativa que reage à popularidade.
O robô músico precisa de seguidores e comentários no Twitter, amigos no Facebook e MySpace, para ficar animado e tocar um ritmo musical mais rápido e alegre. Ele vasculha a sua popularidade na internet e avisa pelo Twitter qual é o seu estado atual.
No momento em que escrevo, o Twitter ( http://twitter.com/cybraphon ) mostra que ele está muito triste.
I am feeling: gloom
Talvez com mais seguidores e mais comentários no Twitter a sua situação melhore um pouco. 🙂
Não é possível assistir em tempo real a reação musical do Cybraphon, mas alguns vídeos estão disponíveis pela rede, demonstrando um pouco da música que o sistema toca.
A música é um chiclé. Fiquei com a melodia grudada na memória por dias.
http://cybraphon.com/
Mais informações.
Robô com bigodes
Todos sabem que não é uma boa ideia cortar os bigodes do seu animal de estimação.
Baseados no aprimoramento sensorial que os bigodes providenciam para algumas espécies, a equipe de pesquisadores do Bristol Robotic Laboratory desenvolveu o robô – SCRATCHbot – que possui varetas em constante movimento e sensíveis ao toque.
A tocar um objeto as varetas se movem com uma velocidade menor, ao passo que as na posição oposta aumentam a intensidade do movimento para tentar sondar com mais facilidade o ambiente em volta.
Por enquanto o modelo não possui aplicação direta, e no futuro talvez poderia ser utilizado para resgate de seres humanos e sondagem de ambientes perigosos (as velhas desculpas para inventar robôs estranhos :-)).
Os pesquisadores planejam que próxima versão talvez conseguirá identificar a diferença da textura do ambiente ao redor. Minha sugestão é que usar como inspiração a toupeira nariz-de-estrela.
Site do projeto
http://www.brl.ac.uk/projects/neuro/index.html
Via Fogonazos
Biomechanics: Robotic whiskers used to sense features
Nature 443, 525 (5 October 2006) | doi:10.1038/443525a
Robôs rápidos e ágeis
Mais algumas barreiras parecem ter sido superadas na robótica. A rapidez e agilidade também podem ser incluídos no rol das habilidades dos robôs.
O projeto é desenvolvido pelo Ishikawa Hashimoto Laboratory e tem como objetivo o desenvolvimento de protótipos que utilizem informações de diversos sensores, e que consigam preencher a ausência de informação de algum dos sistemas com a interação do conjunto.
Pronto! Posso ser substituído por um robô. Não consigo fazer o truque da caneta entre os dedos.
Via Geeks Are Sexy
Ornitópteros
Quando penso em um avião que pode bater as asas, inevitavelmente lembro das antigas tentativas frustradas de construção dos primeiros aviões. Tenho aqueles filmes em preto e branco gravados na memória, com acidentes estranhos e divertidos (acho, que sem vítimas).
Este tipo de projeto exótico, com asas móveis, é batizado de ornitóptero ( do grego ´ornithos´ ave e ´pteron´ asa) e apresenta desenvolvimento tecnológico lento e que ainda causa uma certa estranheza pelo movimento desengonçado.
A Wikipedia traz um histórico dos projetos de oritópteros tripulados, com uma primeira tentativa, de sucesso duvidoso, em 1929.
http://en.wikipedia.org/wiki/Ornithopter#Manned_flight
As tentativas mais recentes são do grupo da University of Toronto Institute for Aerospace Studies, chefiado pelo Professor James DeLaurier.
http://www.ornithopter.net/
Teste realizado em 8 de julho de 2006.
O impulso inicial para decolagem foi conseguido com propulsão por jato, mas os projetistas afirmam que boa parte do trabalho foi feito pelo bater das asas.
Fatores culturais, o sucesso de projetos com asas rígidas e dificuldades técnicas tem afetado o fluxo de financiamentos para este tipo de iniciativa. E quase unicamente os modelos não-tripulados tem atraído interesse, ou de entusiastas aeromodelistas ou de militares para aplicação em espionagem.
Um portal com informações na área
http://www.ornithopter.org/
Bônus.
Encontrei um vídeo estranho de pilotos sofrendo acidentes propositadamente!
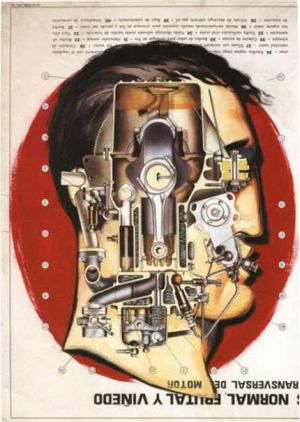
Biomecânica artística
O artista Fernando Vicente explorou de maneira fantástica a fronteira entre a anatomia e a mecânica.
Nascido em Madri, o artista colabora com frequência para o jornal El País e revistas como Gentleman, Letras Libres, Cosmopolitan e DT.


Veja todas as imagens no blog
http://fernandovicenteanatomias.blogspot.com/
A reprodução das imagens foi gentilmente autorizada por Fernando Vicente.
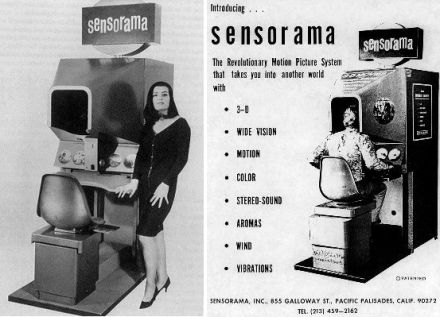
Sensorama
Ao assistir o filme ´O passageiro do futuro´ (The Lawnmower Man) eu pensei que a tecnologia da realidade virtual teria um desenvolvimento muito mais rápido do que realmente aconteceu. Parece que esse lento desenvolvimento é uma realidade à muito mais tempo do que eu imaginava.
O Sensorama foi uma das primeiras tentativas de se desenvolver uma tecnologia imersiva e multi-sensorial. Com uma patente registrada em agosto de 1962, Morton Heilig revelou os detalhes de um aparelho que poderia simular a experiência de um passeio de motocicleta pelas ruas do Broklyn. O usuário da máquina poderia sentir o vento em seu rosto, a vibração da motocicleta, conseguir uma visão em 3D do ambiente e até sentir cheiros da cidade!


Trailer
O autômato de Maillardet

O autômato de Maillardet estava entre as doações feitas pela família Brock para o Franklin Institute, em novembro de 1928. A peça estava bastante danificada e com sinais de que havia passado por um incêndio. Apesar dos danos a família sabia que o artefato antes conseguia desenhar imagens e escrever frases, mas desconhecia o real autor do invento.
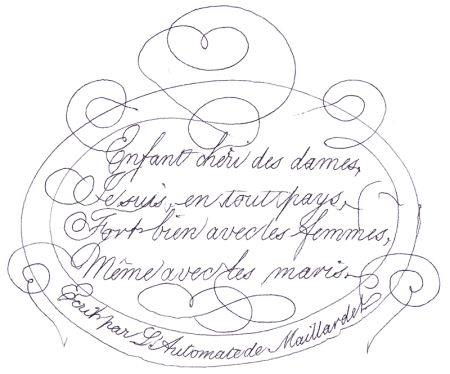
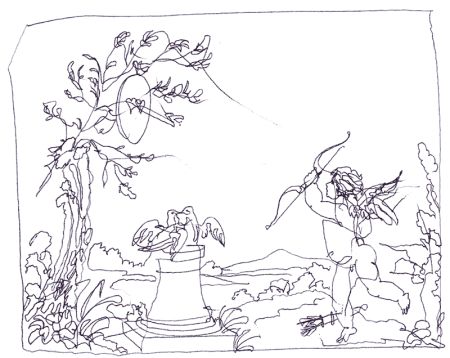
Feitos os reparos, o autômato foi posto para funcionar, e, após fazer alguns desenhos e escrever poemas, a máquina finalizou uma de suas sobras escrevendo: “Ecrit par L’Automate de Maillardet.” [Escrito pelo autômato de Maillardet] . Esta seria então a primeira vez em que uma máquina guardava o segredo de sua identidade na própria memória!
Henri Maillardet foi um mecânico suíço do século 18, que trabalhava em Londres produzindo relógios e outros mecanismos. Maillardet trabalhou por um tempo nas lojas de Pierre Jaquet-Droz, que estava no negócio de produção de autômatos que poderiam escrever e desenhar. Acredita-se que o autômato da família Brock foi construído em torno de 1800. Henri fez apenas um outro autômato que poderia escrever (em chinês), e foi feito para o Imperador da China, como um presente do Rei George III da Inglaterra.
O autômato do Franklin Institute possui a maior “memória” de qualquer máquina de sua categoria já construída, com quatro desenhos e três poemas (dois em francês e um em Inglês).
– – –
– – –
– – –

A memória esta contida em ´engrenagens´ de tambor de latão. Ao rodar, as engrenagens são percorridas por ´dedos´ metálicos que transformam os sulcos em movimentos laterais, para frente e trás, e de sobre e desce da caneta.

As imagens deste texto foram utilizadas com a autorização do The Franklin Institute.
Mais detalhes, informações e imagens em
http://www.fi.edu/learn/sci-tech/automaton/automaton.php?cts=instrumentation
Ajude um pequeno robô

Os Tweenbots são robôs dependentes de humanos que navegam por Nova Iorque com a ajuda de pedestres que encontram pelo caminho. Com movimento em velocidade constante e em linha reta, os Tweenbots possuem o seu destino exibido em uma bandeira, e dependem que as pessoas leiam a mensagem e os direcionem corretamente para atingir o seu objetivo.
Em uma missão, o robô atravessou o Washington Square Park, de Nova Iorque, em 42 minutos com a ajuda de 29 pessoas. Em nenhuma das tentativas o robô foi perdido ou danificado.
Parece que a taxa de sucesso está mesmo ligada à aparência simpática e frágil do robô.
Esta idéia funcionaria no Brasil?
Site do projeto
http://www.tweenbots.com/
Via Engadget
