Agência Espacial Européia estende a missão Envisat
 |
|
| O Envisat (concepção artísitca) |
5 de junho de 2009
Os Estados Membros da ESA votaram unanimemente pela extensão da missão Envisat até 2013. O Envisat – o maior satélite do mundo e o mais sofisticado já construído – vem proporcionando aos cientistas e utilizadores operacionais dados inestimáveis para monitoramento e previsões globais desde seu lançamento em 2002.
“A decisão de estender as operações da missão Envisat, tomada durante o último encontro da Direção do Programa de Observação da Terra da ESA, é um reconhecimento do sucesso da missão, em termos do grande número de usuários científicos e operacionais atendidos, e do bom estado técnico do satélite após sete anos de funcionamento”, declarou o Gerente da Missão Envisat, Henri Laur.
O Envisat – sigla para ENVIronmental SATellite (Satélite Ambiental) – tem uma singular combinação de 10 instrumentos diferentes que coletam dados acerca da atmosfera, das terras, dos mares e das superfícies geladas da Terra – fornecendo aos cientistas o quadro mais detalhado, até hoje, do estado do planeta.
 |
|
| Mapa da cobertura global do Envisat |
Os dados do Envisat jamais tiveram tanta procura como hoje em dia e muitos dos serviços estabelecidos dependem da obtenção dos dados em tempo quase-real (near-real time = NRT). Os dados estão sendo cada vez mais empregados em aplicações de rotina, tais como o monitoramento das calotas de gelo sobre os mares, vazamentos de petróleo e repressão à pesca ilegal, que precisam do acesso mais rápido possível aos dados, de forma a permitir a rápida tomada de decisões.
Os dados em NRT do Envisat possibilitam fornecer diariamente temperaturas da superfície do mar, mapas de incêndios por todo o mundo, previsões de níveis de radiação UV e de ozônio, tudo acessível através da página Today’s Earth check-up no website da ESA.
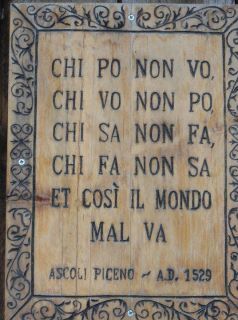
Outro motivo para a extensão da missão foi a necessidade dos cientistas de poderem acessar dados que cubram longos períodos de tempo, a fim de identificar e analisar tendências e mudanças climáticas de longo prazo (tais como as concentrações de gases de efeito-estufa, temperaturas da superfície do mar, níveis dos mares e extensão das calotas de gelo sobre os mares).
 |
|
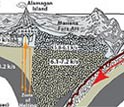
| Interferograma do Envisat do terremoto em L’Aquila |
O Envisat obtém isso mantendo a continuidade do fluxo de dados que começou, no início dos anos 1990, com os satélites anteriores da ESA, ERS-1 e ERS-2. Com a prorrogação, o Envisat vai cobrir a lacuna nos dados que existiria até o lançamento dos satélites da série Sentinel que farão parte da iniciativa Global
Monitoring for Environment and Security (GMES) (Monitoramento Global para Ambiente e Segurança).
O Sentinel-1 vai assegurar a continuidade do imageamento por radar. O Sentinel-3 vai dar continuidade às funções de altímetro por radar e sensores ópticos do Envisat. E a missão precussora do Sentinel-5 vai dar continuidade aos sensores atmosféricos do Envisat.
A missão Envisat gera uma grande quantidade diária de dados, através da rede de estações de aquisição e centros de processamento, que se estende por toda a Europa. O acesso aos dados do Envisat tem recebido contínuos upgrades desde seu lançamento, disponibilizando uma crescente quantidade de dados online inteiramente de graça.
Mapeando os raios cósmicos
 |
|
| Standard Radiation Environment Monitor (SREM) |
Missões recém-lançadas estendem a capacidade da ESA para o mapeamento da radiação no espaço
3 de junho de 2009
Enquanto os observatórios Herschel e Planck se dirigem para suas órbitas finais a 1,5 milhões de quilômetros da Terra, cada uma das naves leva um pequeno, porém importante, passageiro a bordo – um dispositivo do tamanho de uma caixa de sapatos, o mais recente de uma família de monitores que pegam carona nas missões da ESA para mapear as variações nas radiações em diferentes regiões do espaço.
O instrumento é conhecido como Standard Radiation Environment Monitor
(SREM) (Monitor Padrão de Radiação Ambiente) e foi projetado para detectar partículas altamente carregadas expelidas pelo Sol, as que envolvem a Terra nos cinturões de radiação, ou as que têm origem no espaço interestelar – conhecidas como “raios cósmicos”. O principal propósito do SREM é identificar os perigos de radiação que ameacem suas espaçonaves hospedeiras, porém também fornecem um quadro detalhado da radiação ambiente no espaço.
Herschel e Planck estão transportando seus SREMs para o distante Segundo Ponto Lagrangiano (L2), um ponto no espaço onde as gravidades do Sol e da Terra combinadas mantém a espaçonave orbitando o Sol na mesma velocidade da Terra. Esses monitores vão se juntar a outros SREMs que já estão em funcionamento em várias outras órbitas:
- em órbita baixa na Terra, o mini-satélite Proba-1
- em órbita média na Terra o satélite de teste GIOVE-B, lançado para testar o sistema de navegação do Galileu
- no observatório de raios gama INTEGRAL cuja órbita altamente excêntrica o leva a um máximo de 153.000 km de distância da Terra
- e a bordo da missão de encontro com cometa Rosetta, no espaço profundo além de Marte.
 |
|
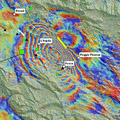
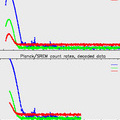
| Dados de unidades SREM após o lançamento (acima: Herschel, abaixo: Planck) |
“Pela primeira vez fomos capazes de observar os mesmos eventos gerados por partículas energéticas vindas do Sol de diferentes posições no Sistema Solar ao mesmo tempo, usando basicamente o mesmo instrumento”, disse Petteri Nieminen da seção de Efeitos e Ambientes Espaciais da ESA. “Isso é uma coisa sem precedentes”.
O campo magnético da Terra a protege das radiações interplanetárias, mas essa proteção diminui com a distância. O SREM na menor altitude, a bordo do Proba-1, orbita basicamente dentro dessa “magnetosfera”, embora sua trajetória passe através de uma zona de incidência de partículas altamente energéticas conhecida como Anomalia do Atlântico Sul.
Os SREMs em órbitas mais altas passam totalmente da magnetosfera, atravessando as faixas de partículas radiativas aprisionadas conhecidas como Cinturões de Van Allen, enquanto que ps SREMs a bordo da Rosetta, e agora do Herschel e do Planck colhem amostras da radiação longe da órbita terrestre no espaço interplanetário.
Os dispositivos podem ser encarados como os equivalentes em satélites aos dosímetros de radiação usados pelos astronautas em órbita. Altos níveis de radiação podem estragar os dispositivos eletrônicos de espaçonaves, assim como materiais cruciais a bordo, tais como lentes de sensores e células solares. Porém, seu efeito no corpo humano sem proteção seria ainda pior.
“A radiação será uma questão crucial quando chegarmos ao planejamento de futuras missões tripuladas de exploração da superfície lunar e de Marte”, explica Nieminen. “A exposição aos prótons e elétrons da mais alta energia detetados pelos SREM poderia causar sérios casos de envenenamento por radiação em astronautas desprotegidos”.
O projeto do SREM incorpora diodos que geram um campo elétrico mensurável quando entram em contato com partículas energéticas carregadas. Colocados atrás de entradas cônicas, esses diodos são sensíveis à direção, assim como à carga e energia das partículas incidentes.
Um lote de unidades SREM foi contruído em 2000 pela firma suíça Oerlikon Space (então conhecida como Contraves) que trabalhou em conjunto com o Instituto Paul Scherrer, da Suíça, sob contrato com a ESA.
 |
|
| Herschel e Planck |
O projeto foi desenvolvido a partir de um antigo Monitor de Radiação Ambiente (Radiation Environment Monitor = REM) empregado no satélite STRV 1B do Reino Unido e na Estação Espacial Mir durante a década de 1990. O primeiro SREM foi para o espaço a bordo do satélite STRV-1c, mas seu funcionamento foi abruptamente abreviado por uma falha na espaçonava. Com mais seis unidades agora no espaço, continuam disponíveis três outras SREMs para futuras oportunidades.
Os resultados dos SREM em operação até esta data estão servindo para realimentar os projetos de futuras espaçonaves. A órbita da GIOVE-B, por exemplo, a conduz através do extremamente radiativo Cinturão Exterior de Van Allen e suas descobertas auxiliaram a calcular a blindagem necessária para os satélites da série Galileo que a seguiram.
“Os modelos anteriores com que vinhamos trabalhando, se baseavam em dados da NASA dos anos 1960-70”, diz Nieminen . “Porém, com um instrumento europeu nós fomos capazes de realmente quantificar a radiação e, com efeito, constatamos algumas divergências entre os velhos modelos e o que observamos por nós próprios”.
Os mais recentes SREMs vão sondar as condições de radiação prevalentes em L2, provavelmente dados valiosos para as várias novas missões nessa década previstas para essa área, inclusive a missão GAIA da ESA e o Telescópio Espacial James Webb, uma missão conjunta ESA-NASA.
Futuras missões provavelmente portarão seus próprios detectores de radiação: a seção de Ambientes e Efeitos Espaciais da ESA está planejando o desenvolvimento da próxima geração de unidades que serão muito mais compactas do que os 2,5 kg do SREM e terão uma performance melhor.
Os atuais SREMs demonstraram ter realmente uma sensibilidade muito alta, recorda-se Nieminen: “Em 27 de dezembro de 2004, a unidade a bordo da missão INTEGRAL conseguiu detectar um clarão em raios-X vindo de uma estrela de nêutrons, ao mesmo tempo que o satélite hospedeiro, coisa que ele jamais foi projetado para fazer”.
Metal capilar (o Dr. Guo ataca novamente)
Pois é… A Universidade de Rochester está anunciando outra descoberta bombástica da equipe do Dr. Guo: um metal que faz o líquido subir contra a gravidade, como se fosse um pavio. Se você tem o FlashPlayer instalado em seu navegador, aproveite para ver o filme.
A idéia é até simples: escavar micro-canais na superfície de um metal com o tal laser. Os campos magnéticos (mais fortes) dos átomos do metal se tornam capazes de atrair as moléculas do líquido com mais força/rapidez do que as outras moléculas do próprio líquido e o metal preparado suga o líquido.
A idéia inicial é aplicar esse metal a dispositivos de diagnóstico médico, por exemplo, micro-analisadores de sangue.
Resta saber que outros “segredos” o Dr. Chunlei Guo (e seu assistente, Anatoliy Vorobyev) continuam guardando para futuras publicações na Applied Physics Letters.
Explorando os abismos oceânicos
![]()
Nereus é o primeiro veículo submarino que permite uma investigação científica rotineira das profundezas dos oceanos por todo o mundo
|
O veículo híbrido de controle remoto Nereus pode funcionar ligado por cabos a um navio-mãe, ou de modo independente. |

2 de junho de 2009
O Abismo é um lugar negro e profundo, mas não é mais oculto. Ao menos quando o Nereus está em cena. O Nereus é um novo tipo de veículo robótico para mares profundos, chamado de veículo híbrido de controle remoto (hybrid remotely operated vehicle = HROV).
O Nereus mergulhou a 10.902 metros em 31 de maio de 2009, no Challenger
Deep na Fossa das Marianas no Oceano Pacífico Ocidental, relata uma equipe de engenheiros e cientistas a bordo do navio de pesquisas Kilo Moana.
Esse mergulho torna o Nereus o recordista mundial em mergulho às profundezas e o primeiro veículo a explorar a Fossa das Marianas desde 1998.
|
|
|
O veículo de controle remoto Nereus chegou com sucesso ao fundo do abismo: o lugar mais profundo do oceano. |

“A maior parte das profundezas dos oceanos permanece inexplorada”, disse Julie Morris, diretora da Divisão de Ciências Oceânicas da Fundação Nacional de Ciências (NSF), que financiou o projeto. “Os cientistas oceânicos têm agora uma ferramenta única para recolher imagens, dados e amostras de todas as partes nos oceanos, em lugar daquelas partes mais rasas do que 6.500 metros. Com sua tecnologia inovadora, o Nereus permite estudar e compreender regiões do oceano anteriormente inacessíveis”.
O projeto único de veículo híbrido do Nereus o torna idealmente adequado a explorar as últimas fronteiras do oceano, dizem os cientistas marinhos. O veículo não tripulado é remotamente operado por pilotos a bordo de um navio de superfície através de um cabo – especialmente fino, feito de fibra ótica e de baixo peso – que permite que o Nereus mergulhe até o fundo e seja altamente manobrável. Entretanto, o Nereus também pode ser transformado em um veículo autônomo que navega livremente.
“Alcançar profundidades tão extremas é o pináculo dos desafios técnicos”, observou Andy
Bowen, gerente de projeto e o principal responsável pelo desenvolvimento do Nereus na Instituição Oceanográfica Woods Hole (WHOI). “A equipe ficou satisfeita com o Nereus ter tido sucesso em alcançar o ponto mais profundo do oceano e retornado com imagens e amostras de um mundo tão hostil. Com um robo como o Nereus agora podemos explorar qualquer lugar do oceano. As fossas são virtualmente inexploradas e o Nereus vai permitir que sejam feitas novas descobertas nelas. O Nereus marca o começo de uma nova era na exploração oceânica”.
|
|
|
O veículo híbrido de controle remoto Nereus coletando sedimentos na Fossa das Marianas. |

Nereus
(em português, Nereu) é um deus grego mítico que tem uma cauda de peixe e torax de homem. O veículo foi batizado com um nome escolhido em um concurso nacional aberto para estudantes de segundo grau.
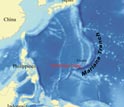
A Fossa das Marianas forma a fronteira entre duas placas tectônicas, onde a Placa do Pacífico é subduzida por baixo da pequena Placa das Marianas. Ela faz parte do Anel de Fogo do Pacíifico, uma área com 40.000 km onde ocorre a maior parte das erupções vulcânicas e terremotos do mundo ocorre. A 11.000 metros, sua profundidade equivale à altitude de voo dos aviões comerciais.
Para alcançar a fossa, o Nereus mergulhou duas vezes mais fundo do que os submersíveis de pesquisas são capazes e teve que suportar pressões 1.000 vezes maiores do que as da superfície da Terra – forças esmagadoras similares às existentes na superfície de Vênus, de acordo com Dana Yoerger da WHOI e Louis Whitcomb da Universidade Johns Hopkins, que desenvolveram os sistemas de navegação e controle do veículo, e realizaram mergulhos sucessivamente mais profundos para testar o Nereus.
“Não poderíamos estar mais orgulhosos das realizações dessa equipe talentosa e dedicada”, declarou Susan Avery, presidente e diretora da WHOI. “Com esse teste de engenharia completado com sucesso, estamos ansiosos para que o Nereus
venha a ser largamente empregado para explorar os locais mais inacessíveis do oceano. Sem parte alguma do fundo do mar fora de nosso alcance, é excitante pensar em quais descobertas nos aguardam”.
Somente dois outros veículos tiveram sucesso em alcançar a Fossa das Marianas: o batiscafo Trieste, feito pela marinha americana, que levou Jacques Piccard e Don Walsh lá em 1960, e o robo japonês Kaiko, que realizou três expedições não tripuladas à fossa entre 1995 e 1998.
O Trieste foi aposentado em 1966 e o Kaiko foi perdido no mar em 2003.
|
|
|
A Fossa das Marianas, o ponto mais profundo dos oceanos do mundo, fica perto de Guam. |
A equipe que criou o Nereus acreditava que um robo a cabo que usasse tecnologias tradicionais, seria proibitivamente caro para construir e operar. Assim, eles usaram tecnologias únicas e métodos inovadores para obter um equilíbrio entre tamanho, peso, custo em materiais e funcionalidade.
Somando à experiência anterior no desenvolvimento de robos com cabo e veículos submarinos autônomos, a equipe misturou as duas abordagens para desenvolver um veículo híbrido que pudesse voar como um avião para inspecionar e mapear grandes áreas, e então ser rapidamente convertido em um veículo de controle remoto que pudesse pairar como um helicóptero perto do fundo do mar para realizar experiências ou coletar amostras biológicas ou de rochas.
O sistema de cabeamento apresentou um dos maiores desafios no desenvolvimento de um veículo de controle remoto capaz de atingir tais profundezas. Os sistemas robóticos tradicionais usam cabos de cobre reforçado com aço para alimentar o veículo, e fibras ópticas para permitir a transmissão de informações entre o navio e o veículo. Se um cabo assim fosse ser utilizado para alcançar a Fossa das Marianas, ele se partiria sob seu próprio peso antes de chegar àquela profundidade.
Para solucionar esse desafio, a equipe do Nereus adaptou a tecnologia de fibra óptica desenvolvida pelo Centro de Sistemas Espaciais e de Guerra Naval do Pacífico da Marinha para a transmissão de vídeo e outros dados em tempo real entre o Nereus e a equipe de superfície. Com um diâmetro similar ao de um cabelo humano e com uma resistência de ruptura de apenas 4 kg, o cabo é composto de fibra de vidro com um revestimento plástico muito fino.
O Nereus porta aproximadamente 40 km de cabo em dois recipientes do tamanho de uma lata grande de café que desenrolam a fibra conforme necessário. Usando esse cabo bem esguio, em lugar de um cabo largo, a equipe foi capaz de diminuir o tamanho, peso, complexidade e o custo do veículo.
Outra novidade economizadora de peso nesse veículo é o uso de esferas de cerâmica para flutuação, em lugar da tradicional espuma sintética usada em veículos como o submersível Alvin ou no veículo de controle remoto Jason.
|
|
|
A Fossa das Marianas é a fronteira entre duas placas tectônicas: a do Paíifico e a das Marianas. |
Cada um dos dois cascos do Nereus contém entre 700 a 800 esferas ocas de 9 cm que são precisamente projetadas e fabricadas para suportar pressões esmagadoras.
Os engenheiros da WHOI também desenvolveram um braço robótico hidráulico de manipulação de baixo peso que pode funcionar sob intensa pressão.
Com seu projeto de casco duplo em tandem, o Nereus
pesa quase 3 toneladas a seco e tem cerca de 4,25 m de comprimento e cerca de 2,3 m de largura. Ele é alimentado por mais de 4.000 baterias de íon-lítio. Essas são semelhantes às usadas em computadores laptop e telefones celulares, mas foram cuidadosamente testadas para uso seguro e confiável sob as intensas pressões das profundezas.
“Essas e futuras descobertas do Nereus
serão o resultado de suas versatilidade e agilidade – não existe outro submersível como ele”, disse Tim Shank, um biólogo da WHOI que esteva a bordo da expedição. “Ele permite que vastas áreas sejam exploradas com grande eficácia. Nossa verdadeira realização não é só poder chegar ao ponto mais fundo do oceano, mas a capacidade de agora poder realizar explorações profundas, sem os incovenientes de um pesado cabo de ligação com um navio de superfície, para investigar os mais ricos sistemas geológicos e biológicos da Terra”.
Em 31 de maio, a equipe levou o veículo até os 10.902 metros, o mergulho mais profundo até então. Os testes continuarão ao longo dos próximos dias e a equipe retornará ao porto em 5 de junho. Nesse cruzeiro de engenharia inicial, o modo autônomo do Nereus não foi testado.
Em seu mergulho para a Challenger Deep, o Nereus
levou mais de 10 horas no fundo, enviando imagens de vídeo ao vivo para o navio através de seu cabo de fibra óptica e coletando amostras biológicas e geológicas com seu braço de manipulação, assim como colocando um marco no fundo do mar assinado por aqueles que estavam a bordo do navio de superfície.
“As amostras coletadas pelo veículo incluem sedimentos das placas tectônicas que se encontram na fossa e, pela primeira vez, rochas de partes expostas da crosta de Terra próximas do manto ao Sul de Challenger
Deep”, disse a geóloga Patty Fryer da Universidade do Hawaii, também a bordo da expedição. “Nós saberemos da história toda quando as análises em terra ficarem prontas no laboratório, neste verão. Poderemos integrá-las com os novos dados de mapeamento para contar a saga de uma colisão entre placas com mais detalhes do jamais aconteceu antes nos oceanos do mundo”.
Verbas adicionais para o Nereus foram providas pelo Escritório de Pesquisa Naval, a Adminsitração Nacional Oceância e Atmosférica, a Fundação Família Russel e a WHOI.
-NSF-
![]()
Monitoramento de plataformas “offshore” – tecnologia vinda do espaço
 |
![]()
Usando tecnologia espacial para monitorar campos de petróleo e gás “offshore”![]()
![]()
 |
|
| Controle por satélite para o monitoramento de instalações de prospecção de petróleo e gás “offshore”
|
2 de junho de 2009
Com o auxílio da tecnologia da ESA empregada no monitoramento e controle de satélites, uma nova companhia no Centro de Incubação de Negócios da ESA desenvolveu um sistema para o monitoramento remoto de instalações de prospecção de petróleo e gás “offshore”.
“Nosso sistema batizado de Remote Intuitive Visual Operations system (RIVOPS) (Sistema de Operações Remoto Visual Intuitivo) é baseado em anos de experiência da ESA no monitoramento de satélites e na administração de situações de emergência. É um sistema de alarme e monitoramento que se sobrepõe aos sistemas de controle convencionais comercializados e usados pelas companhias de exploração “offshore” de pertróleo e gás”, explica Alexandre Van Damme da companhia franco-holandesa EATOPS.
 |
|
| Plataforma de pretróleo “offshore”
|
Em uma instalação “offshore”, milhares de parâmetros têm que ser monitorados continuamente. Combinando os parâmetros monitorados em conglomerados e aplicando uma série de algorítimos de filtragem, a EATOPS fornece uma visão geral limpa, gráfica e intuitiva de todas as situações de emergência que podem ocorrer em uma plataforma de petróleo ou outra estrutura “offshore” similar.
O sistema RIVOPS da EATOPS acrescenta funcionalidade aos sistemas de monitoramento já em uso para a supervisão das instalações e auxiliar os operadores das instalações de petróleo e gás a detectar e identificar os problemas de modo mais rápido e eficiente.
 |
|
| Controle de satélites
|
A tecnologia espacial aumenta a segurança
Na ESA, o conceito de agrupar parâmetros em conglomerados principais para monitoramento foi desenvolvido e refinado ao longo dos anos para o controle de satélites. O modo de organizar o monitoramento dos parâmetros dos satélites e o emprego de técnicas de visualização intuitiva se provou ser uma metodologia segura que permite uma tomada de decisões mais rápida.
 |
|
| Envisat
|
Isso tornou possível operar e monitorar continuamente uma grande gama de parâmetros com um número relativamente pequeno de operadores. Para o Envisat, o maior satélite europeu, os operadores têm que monitorar continuamente mais de 20 000 parâmetros, o que é um número comparável ao de uma grande instalação “offshore” de petróleo e gás.
“Dentro de segundos, o operador consegue identificar de onde estão se originando os alarmes e, o que é mais importante, como eles se relacionam entre si. O RIVOPS pode supervisionar constantemente grandes instalações, tais como os campos de pretróleo e gás, e proporcionar aos operadores uma clara compreensão do cenário de uma emergência em tempo real, o que aumenta a segurança geral das instalações”, explica Van Damme.
 |
|
| Operação do sistema RIVOPS
|
Van
Damme é um dos inventores do RIVOPS. Este sistema foi desenvolvido a partir do emprego de tecnologia comprovada da ESA com controles ergonômicos para o controle de seus satélites que consiste de um console que fornece uma visão geral inteligente das situações de alarme. Ele foi desenvolvido no Centro de Incubação de Negócios da ESA no European Space Research and Technology Centre (ESTEC) (Centro Europeu de Pesquisa e Tecnologia Espaciais) em Noordwijk, Holanda, com o apoio dos controladores de voo da ESA, assim como da perícia dos centros de controle de petróleo e gás “offshore” do Mar do Norte localizados em Den Haag
e Den Helder na Holanda, e em Stavanger na Noruega.
 |
|
| O RIVOPS apresenta o status em displays em três dimensões.
|
Um novo display tridimensional para uma melhor supervisão
Outro aspecto inovador do sistema RIVOPS, em comparação com muitos sistemas convencionais de monitoramento industrial, é que ele usa representações em três dimensões para exibir o estado de todos os parâmetros. Isso foi desenvolvido para o controle de satélites a fim de melhorar a visibilidade. Transferido para o RIVOPS, ele foi melhorado com toda uma nova gama de recursos especificamente projetados para instalações “offshore” de petróleo e gás.
O sistema RIVOPS está, atualmente, passando por avaliações or parte de várias instalações no Mar do Norte em águas holandeseas e norueguesas. Van Damme antevê que o sistema RIVOPS poderia dar uma segurança extra para as futuras prospecções planejadas para o Mar Ártico, onde o frágil ecossistema polar, combinado com condições climáticas extremamente rudes, exige um monitoramento extra-cuidadoso, como, por exemplo, o vasto campo de gás de Shtokman no Mar de Barents, que se estima ser um dos maiores campos de gás do mundo.
 |
|
| Plataforma de exploracão de petróleo “offshore”
|
“Localizado a
600 km ao Norte da Peninsula de Kola, os icebergs, ondas de 27 metros e temperaturas de até -50°C, fazem exigências extremas sobre as tecnologias e sistemas necessários a uma extração e transporte seguros desse gás até os litorais da Europa, Rússia e América do Norte”, diz Van Damme.
“Para tais instalações, nosso sistema RIVOPS poderia prover uma segurança extra”.
Fruto do Centro de Incubação de Negócios da ESA
“Este é um excelente exemplo de como a tecnologia espacial pode trazer benefícios para a sociedade”, explica Bruno Naulais, Gerente de Incubação de Negócios da ESA.
“A EATOPS baseou seu sistema em tecnologia bem comprovada que usamos na ESA para
monitorar todos os nossos satélites. Ficando localizada no Centro de Incubação de Negócios da ESA no ESTEC, a EATOPS conseguiu acelerar a aplicação da tecnologia para os negócios de “offshore”. Nossos especialisras em monitoramento de satélites auxiliaram a EATOPS a transferir a comprovada funcionalidade de nossas aplicações para seu novo sistema”.
Escritório do Programa de Tranferência de Tecnologia da ESA (Technology Transfer Programme Office = TTPO)
A principal missão do ESA-TTPO é facilitar o uso de tecnologia espacial e sistemas espaciais para aplicações não espaciais, e demonstrar de forma cabal os benefícios do programa espacial europeu para os cidadãos europeus. O TTPO é responsável pela estratégia geral de transferência de tecnologias espaciais, inclusive a incubação de núcleos de companhias e seu financiamento.